|
Mu Lin | 林沐 Hi, I’m Mu Lin, an undergraduate student majoring in Computer Science and Technology at Sun Yat-sen University, graduating in 2026. I will continue my academic journey as a Master's student at Shenzhen International Graduate School, Tsinghua University, advised by Prof. Yansong Tang. My research focuses on robotic learning and computer vision, particularly in dexterous grasping and manipulation. I am currently advised by Prof. Wei-Shi Zheng and work with Yi-Lin Wei at the Intelligence Science and System Lab (ISEE). |
|
Publications*: equal contribution; †: corresponding author(s) |
|
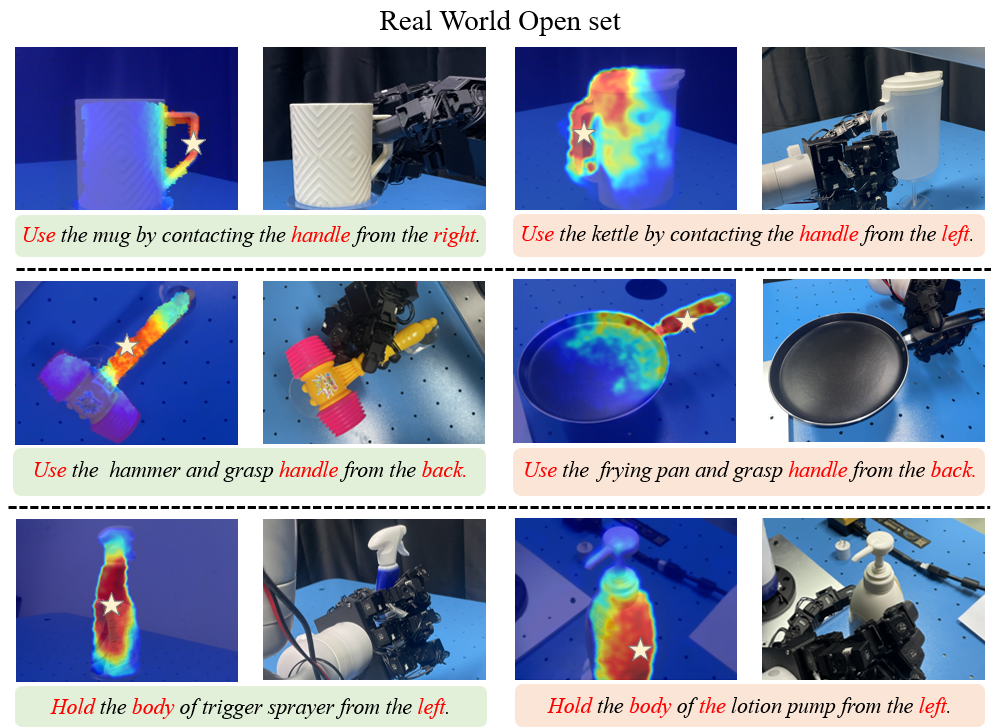
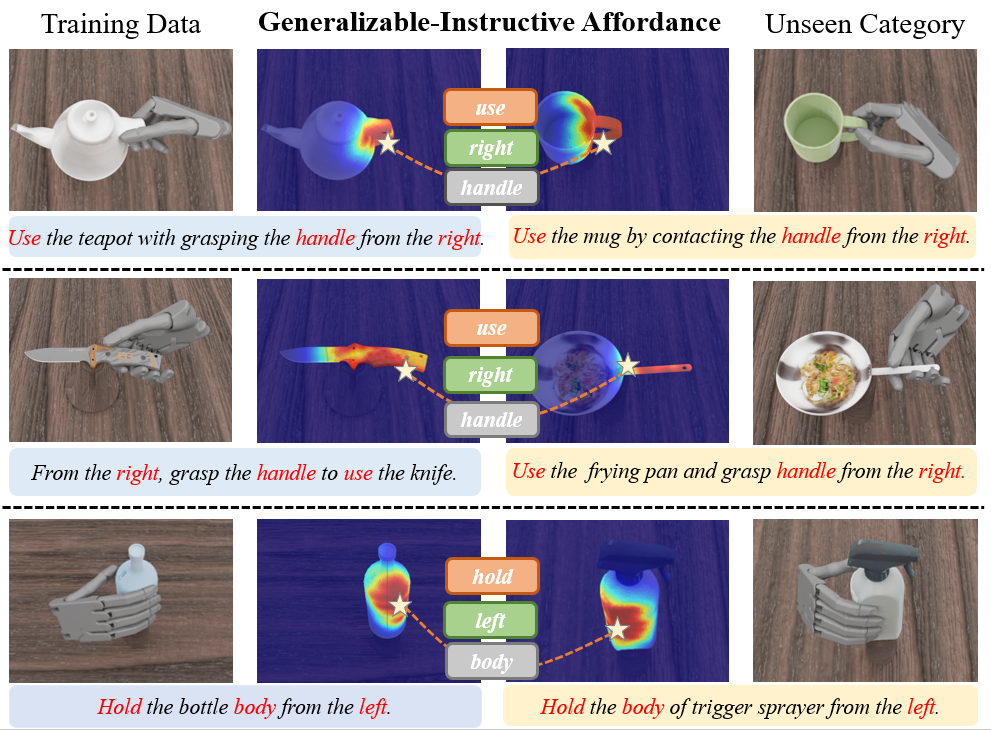
AffordDexGrasp: Open-set Language-guided Dexterous Grasp with
Generalizable-Instructive Affordance
Yi-Lin Wei*, Mu Lin*, Yuhao Lin, Jian-Jian Jiang, Xiao-Ming Wu, Ling-An Zeng, Wei-Shi Zheng†, ICCV, 2025 project page / arXiv / code(coming soon) Open-Set Language-guided dexterous grasp based on generalizable-instructive Affordance. |
|
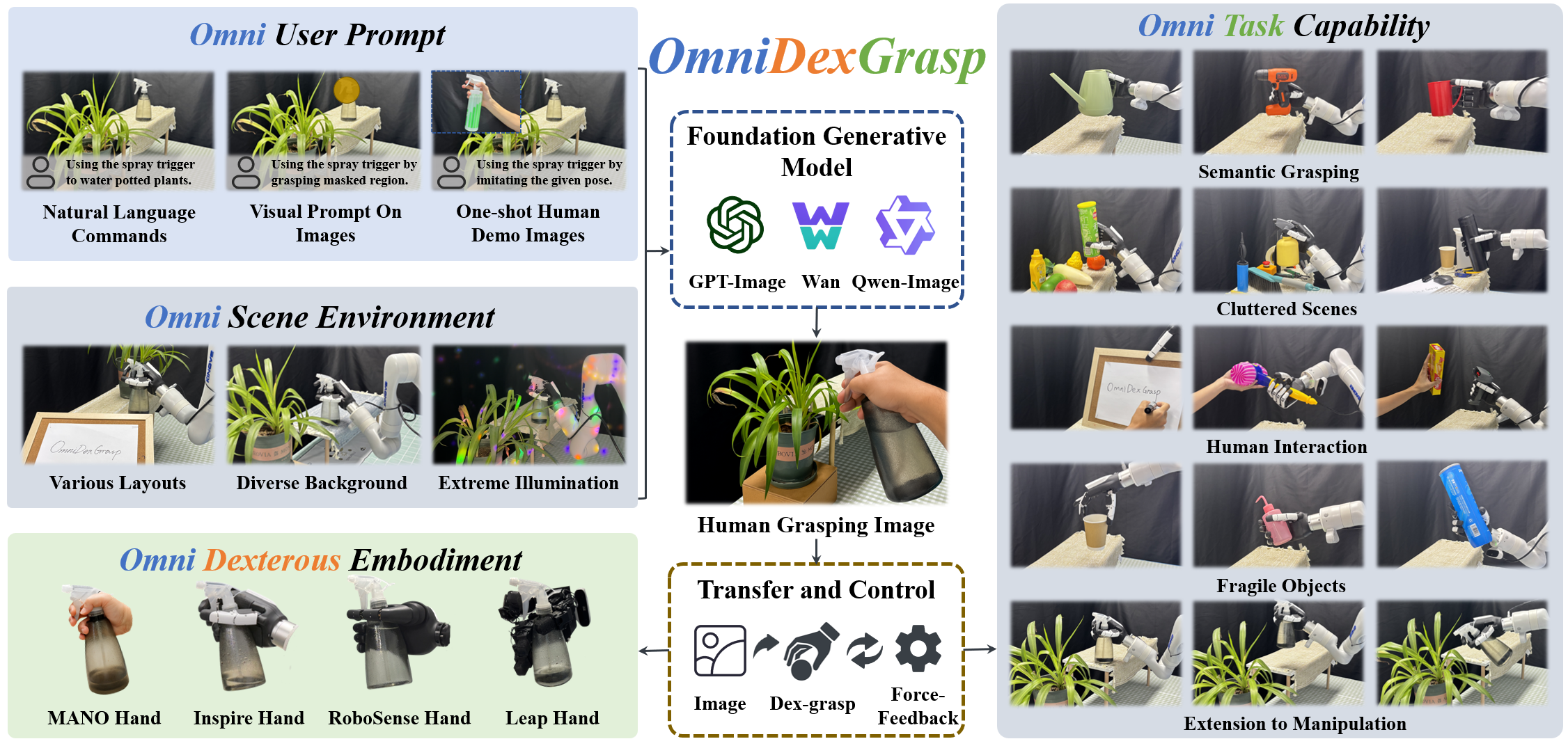
OmniDexGrasp: Generalizable Dexterous Grasping via Foundation Model and Force
Feedback
Yi-Lin Wei*, Zhexi Luo*, Yuhao Lin, Mu Lin, Zhizhao Liang, Shuoyu Chen, Wei-Shi Zheng† under review, 2025 arXiv / project page / code A generalizable dexterous framework that achieves omni-capabilities in user prompting, dexterous embodiment, and grasping tasks. |
|
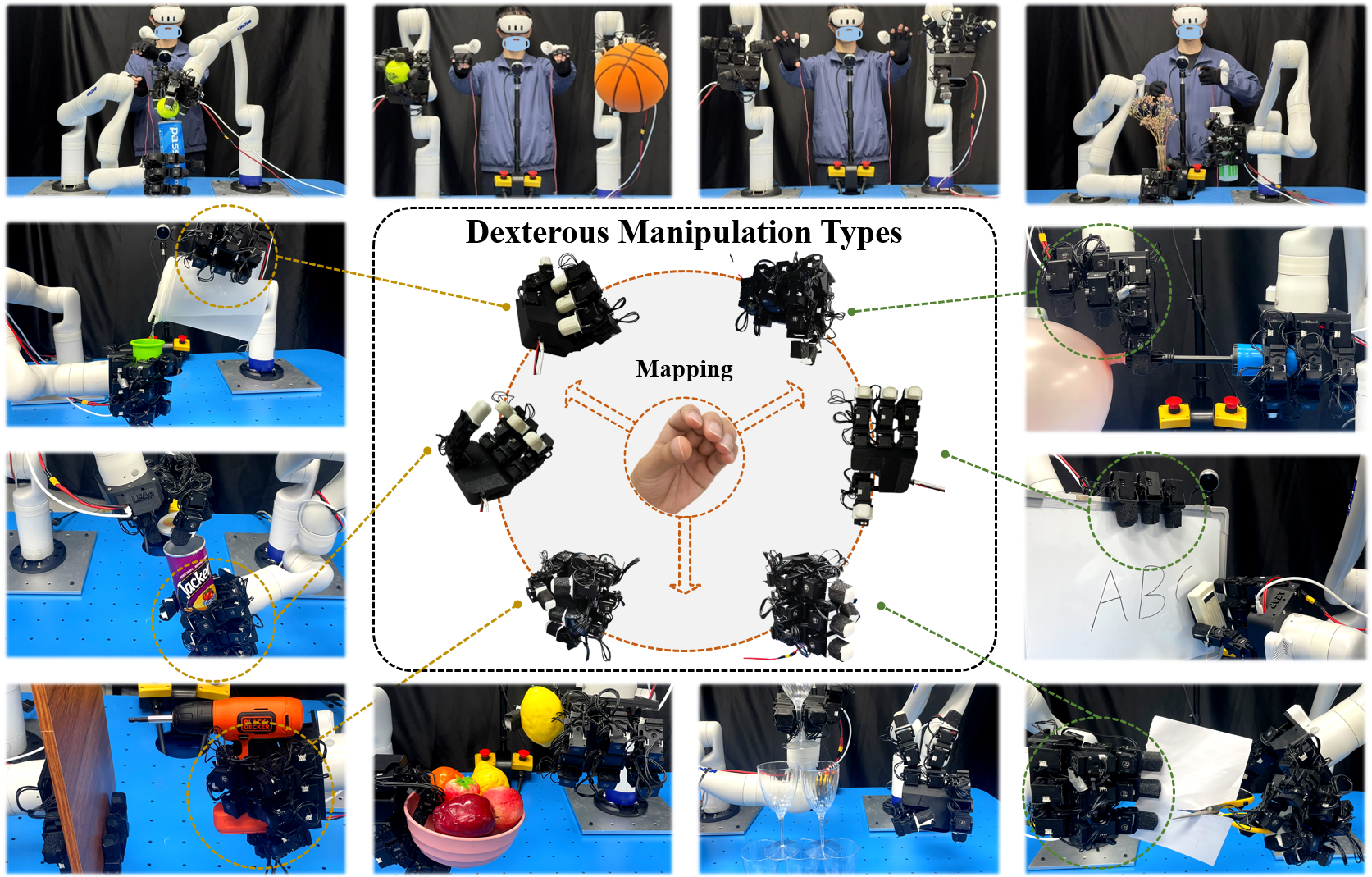
TypeTele: Releasing Dexterity in Teleoperation by Dexterous Manipulation
Types
Yuhao Lin*, Yi-Lin Wei*, Haoran Liao, Mu Lin, Chengyi Xing, Hao Li, Dandan Zhang, Mark Cutkosky, Wei-Shi Zheng†, CoRL, 2025 project page / arXiv / code(coming soon) A type-guided dexterous teleoperation system that enables operators to select appropriate manipulation types for handling various objects and tasks. |
Honor |
- National Scholarship (2023, 2024)
- ICPC Shenyang Regional - Bronze Medal (2022)
- Top-Tier Undergraduate Program 2.0 - Selected (Top 20/400)